17 专利地图
17. 专利地图 >> 17.1 地图原理及设置
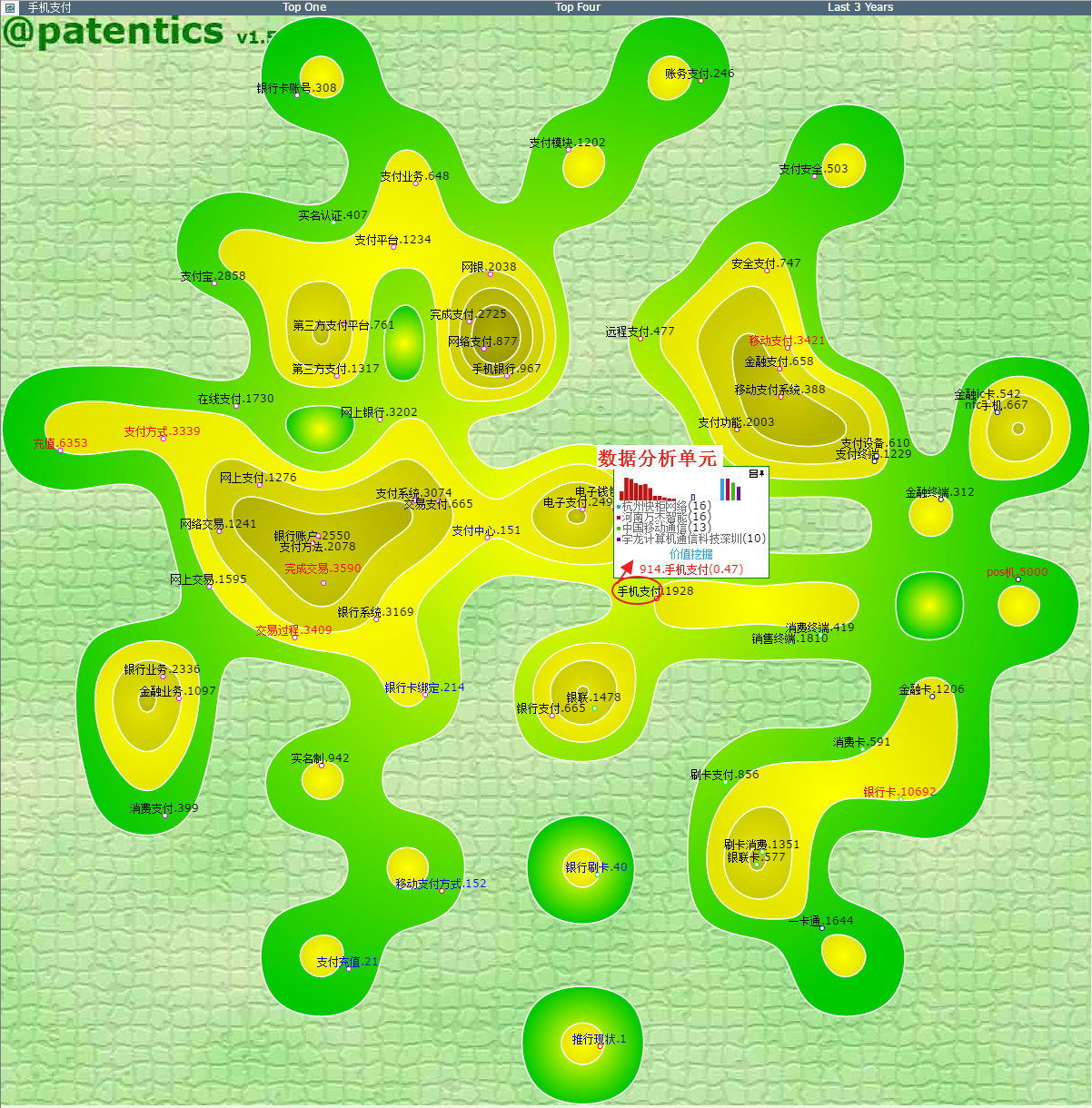
1.地图原理:
凭借全球独创的 Patentics 智能语义数学模型,仅输入一个关键技术点,就可以将该技术相关的技术脉络、技术路线自动通过相关度聚类分析,从高维空间(hyperspace)高精度相关关系,通过相关度保持的映射,投影到 2 维地图空间显示。
2.地图相关设置
1.输入框
输入关键词、一段话、一个专利号;
2.地图模式
输出可以是按概念关联或按专利号关联;
3.地图节点数
地图上显示关联点(技术词、概念词、专利号)的个数
4.地图宽度、高度
单位是像素(px),根据显示器选择合适大小;
5.地图颜色
提供四种颜色,空为默认颜色;
6.数据选择
选择CN为中文关联服务,选择US为英文关联服务;
7.PatentMap
点击绘制地图。

3.绘制地图
设置完成后,点击PatentMap,绘制地图。
1.地图原理:
凭借全球独创的 Patentics 智能语义数学模型,仅输入一个关键技术点,就可以将该技术相关的技术脉络、技术路线自动通过相关度聚类分析,从高维空间(hyperspace)高精度相关关系,通过相关度保持的映射,投影到 2 维地图空间显示。
2.地图相关设置
1.输入框
输入关键词、一段话、一个专利号;
2.地图模式
输出可以是按概念关联或按专利号关联;
3.地图节点数
地图上显示关联点(技术词、概念词、专利号)的个数
4.地图宽度、高度
单位是像素(px),根据显示器选择合适大小;
5.地图颜色
提供四种颜色,空为默认颜色;
6.数据选择
选择CN为中文关联服务,选择US为英文关联服务;
7.PatentMap
点击绘制地图。
3.绘制地图
设置完成后,点击PatentMap,绘制地图。